北理工团队在复杂环境自动驾驶数据集建设方面取得重要成果
时间:2025-03-20 | 作者: | 阅读:0北京理工大学科研团队发布国际首个复杂环境自动驾驶双4d毫米波雷达数据集dual radar,为自动驾驶感知算法研究提供了宝贵资源。该数据集采集了超过400公里真实道路数据,包含超过10000帧同步标注数据,涵盖了多种复杂场景,例如不同天气(晴天、阴天、雨天)、光照条件(正常光照、逆光)、道路类型(城市道路、隧道)以及时间段(白天、黄昏、夜晚)。
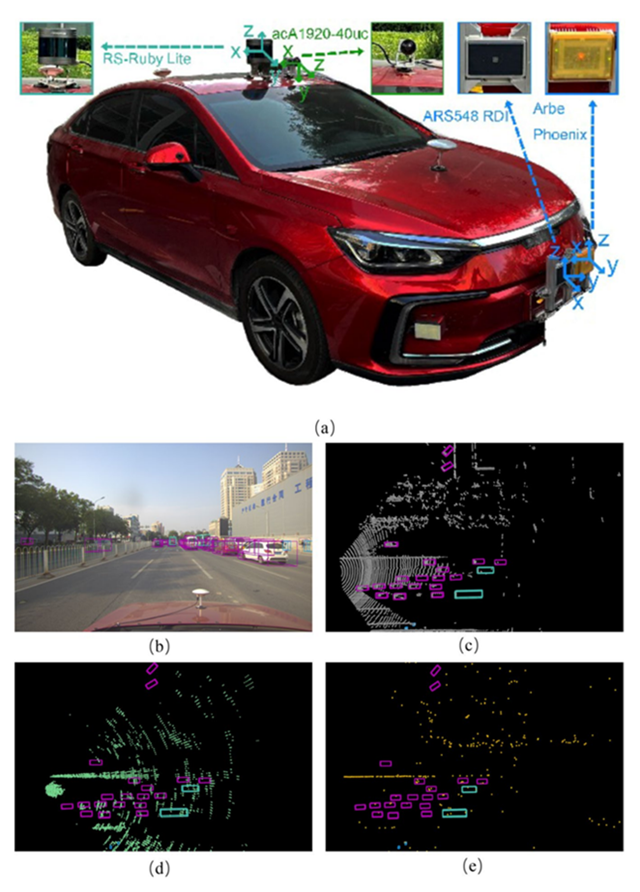
图1:Dual Radar数据采集车辆及传感器数据示例
Dual Radar数据集的核心在于使用了两种不同类型的4D毫米波雷达:Arbe Phoenix和ARS548 RDI。Arbe Phoenix雷达视野广,点云密度高,但噪声也相对较大;ARS548 RDI雷达噪声低,长距离探测精度高,但点云密度较低。 这两种雷达的互补特性,使得Dual Radar数据集能够更全面地评估自动驾驶感知算法在不同点云密度和噪声水平下的性能。
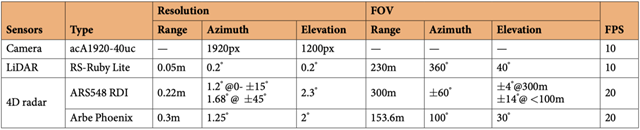
表1:车载传感器参数

图2:目标类别数量及距离分布
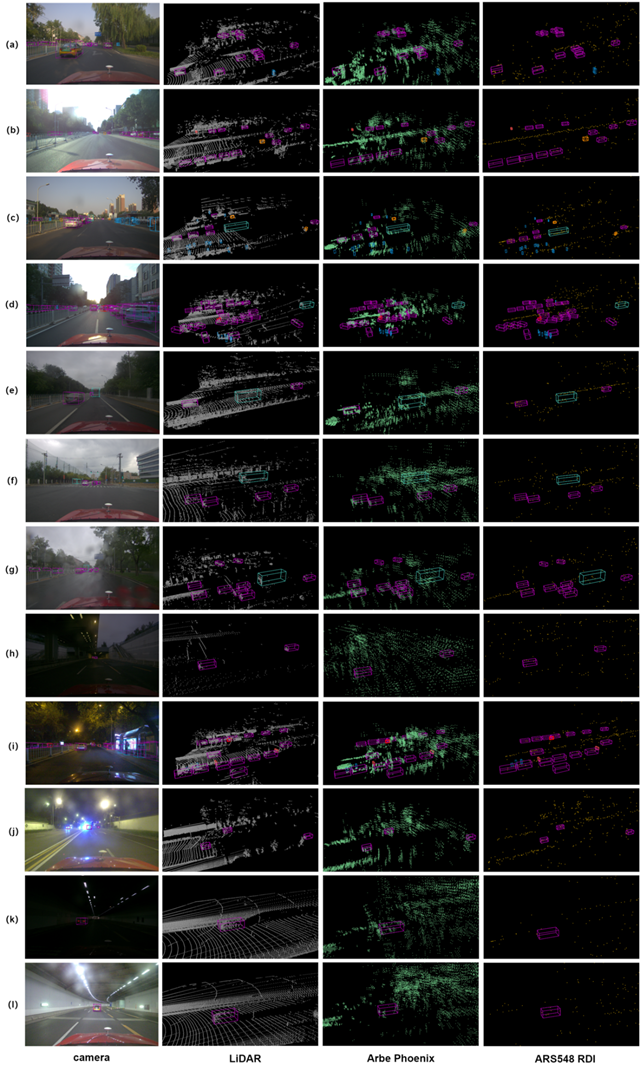
图3:三维目标检测标注示例
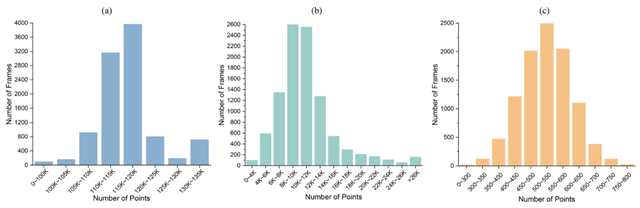
图4:不同传感器点云数量统计
该数据集包含汽车、行人、自行车、公交车、卡车等多种目标类别,并提供了详细的三维目标检测和跟踪标注。 研究团队相信,Dual Radar数据集能够有效推动自动驾驶感知算法在复杂和极端环境下的发展,提升自动驾驶系统的安全性与可靠性,最终促进自动驾驶技术的进步。 数据集已公开发布,方便全球研究人员进行算法测试和改进。

来源:https://www.php.cn/faq/1259411.html
免责声明:文中图文均来自网络,如有侵权请联系删除,心愿游戏发布此文仅为传递信息,不代表心愿游戏认同其观点或证实其描述。
相关文章
更多-
- PhET光学模拟实验操作指南:光的折射反射教程详解
- 时间:2026-05-27
-

- 准点天气关闭广告教程 如何彻底关闭程序化广告推荐
- 时间:2026-05-27
-

- 随手记缓存清理教程 手机记账软件加速技巧
- 时间:2026-05-27
-
- 卡厄斯梦境国服开荒指南与开服奖励详解
- 时间:2026-05-27
-

- 免费在线试玩MCJS游戏 无需下载直接畅玩
- 时间:2026-05-27
-
- 学生通PC版网页登录入口及数字化教育云平台使用指南
- 时间:2026-05-27
-

- 踢踏爵士的冒险毁灭之药卷轴获取位置详解
- 时间:2026-05-27
-

- 毁灭之药技能书与卷轴位置获取攻略
- 时间:2026-05-27
精选合集
更多大家都在玩

大家都在看
更多-

- 原神妮露角色强度解析与培养攻略
- 时间:2026-05-26
-

- 王者荣耀世界游戏设置优化指南
- 时间:2026-05-26
-

- 三角洲行动M7战斗步枪最佳改装方案推荐
- 时间:2026-05-26
-

- 卡厄思梦境卢克卡牌技能效果详解
- 时间:2026-05-26
-
- 异环无名医院快速通关攻略与实用技巧
- 时间:2026-05-26
-

- 王者荣耀世界体力高效规划指南与技巧
- 时间:2026-05-26
-

- 烹饪青菜时,以下哪种做法更能保持营养和口感 蚂蚁庄园今日答案5.25
- 时间:2026-05-26
-

- 光遇5月26日每日任务怎么做 图文攻略详解
- 时间:2026-05-26