UniAct— 清华、商汤、北大、上海AI Lab共同推出的具身基础模型框架
时间:2025-03-21 | 作者: | 阅读:0uniact:一种新型具身基础模型框架
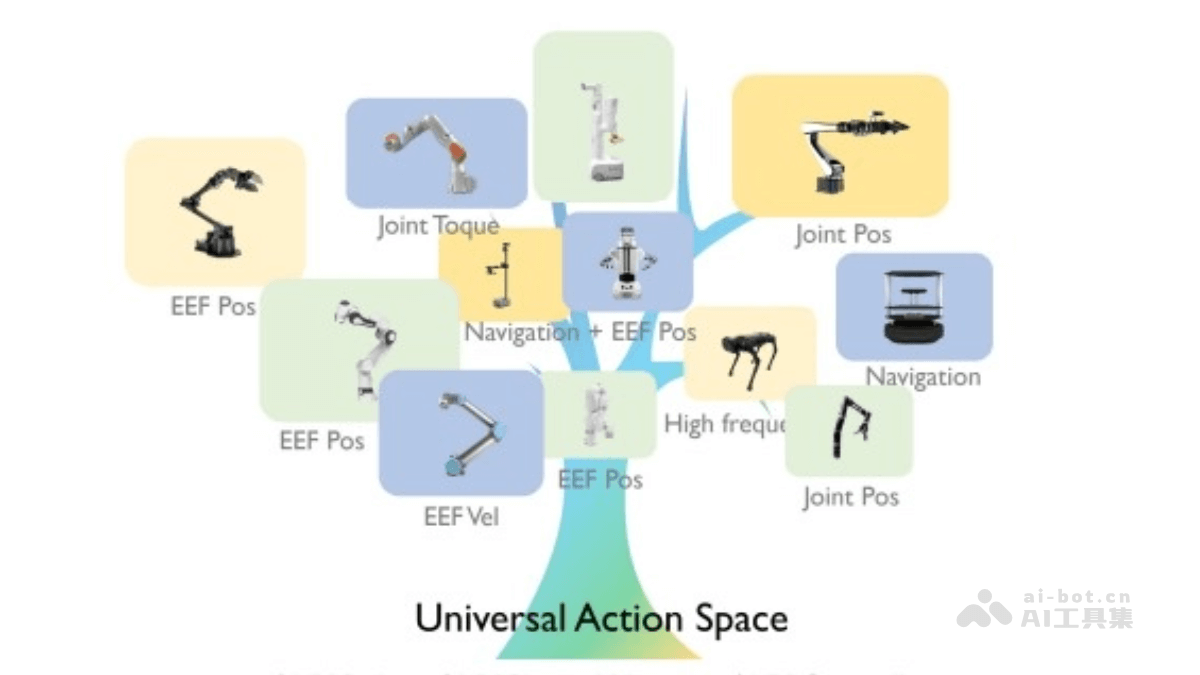
UniAct 是一种创新的具身基础模型框架,旨在解决机器人行为的异构性问题。它通过学习通用行为,提取不同机器人共享的原子行为特征,从而克服由物理形态和控制接口差异造成的行为不一致性。UniAct 的架构主要由通用行为提取器、通用行为空间和异构解码器三部分构成。通用行为提取器基于视觉语言模型,通过观察和任务目标来提取通用行为;通用行为空间采用向量量化码本的形式,每个向量代表一种原子行为;异构解码器则负责将通用行为转化为特定机器人的控制信号。
核心功能:
- 通用动作编码: UniAct 将不同机器人的原子行为(例如“移动到目标位置”或“避开障碍物”)转化为通用的向量化码本,每个代码代表一种可跨平台共享的通用技能。
- 轻量高效: UniAct-0.5B 模型仅需 0.5 亿参数,其真实和模拟环境下的任务表现已超越参数规模达 14 亿的 OpenVLA 模型。
- 快速适应性: UniAct 仅需 50 条专用示教数据即可在新环境中微调,并能快速适应新的机器人和控制接口。只需添加轻量级解码器,即可轻松扩展到新的机器人平台。
- 跨领域数据利用: UniAct 通过通用行为空间,更有效地利用跨领域数据进行训练,从而在不同机器人和环境中实现更强大的泛化能力。
- 行为一致性: 在不同的部署场景和机器人类型上,相同的通用动作能展现出一致的行为模式,为具身智能体的控制提供了更便捷的方式。用户只需从码本中选择相应的通用动作,即可指挥不同类型的机器人完成任务。
技术原理详解:
- 通用动作空间: UniAct 利用向量量化构建了一个离散的通用动作空间,该空间是一个向量化码本,每个向量嵌入代表一种通用的原子行为。这些原子行为是不同机器人在不同环境下共享的基本行为模式。
- 通用动作提取器: 基于视觉语言模型 (VLM),UniAct 的通用动作提取器能够识别和提取通用动作。它根据观察结果和任务目标,输出选择通用动作的概率。
- 异构解码器: UniAct 使用异构解码器将通用动作转换为特定机器人的可执行命令。这些解码器针对不同的机器人平台进行设计,能根据机器人的具体特征将通用动作转换为具体的控制信号。
- 轻量化架构与高效训练: UniAct 采用轻量化模型架构,即使参数较少也能保持优异的性能。它通过行为克隆损失进行训练,并根据动作标签的性质选择合适的损失函数。
项目信息:
- 项目官网: https://www.php.cn/link/a87823bb4525992c4faeea10b5965d6c
- Github 仓库: https://www.php.cn/link/a87823bb4525992c4faeea10b5965d6c
- arXiv 技术论文: https://www.php.cn/link/a87823bb4525992c4faeea10b5965d6c
应用场景:
UniAct 的应用前景广泛,包括自动驾驶、医疗机器人、工业自动化和智能家居等领域。其通用性使其能够高效地控制各种类型的机器人,并适应不同的环境和任务需求。

来源:https://www.php.cn/faq/1260467.html
免责声明:文中图文均来自网络,如有侵权请联系删除,心愿游戏发布此文仅为传递信息,不代表心愿游戏认同其观点或证实其描述。
相关文章
更多-

- 花小猪打车添加途经点教程 轻松设置多目的地行程
- 时间:2026-05-27
-

- 国航APP添加常用乘机人详细步骤指南
- 时间:2026-05-27
-

- 芙娅之魂诺克斯BOSS打法攻略 阵容搭配与实战技巧详解
- 时间:2026-05-27
-

- 三国计手游吕布强度解析与培养实战全攻略
- 时间:2026-05-27
-

- 陕西社保APP亲属认证操作指南
- 时间:2026-05-27
-

- 绿叶修图去除水印的详细步骤与实用技巧
- 时间:2026-05-27
-

- OpenCLaw配置要求详解与优化指南
- 时间:2026-05-27
-

- 轻听英语APP扫码功能使用教程与位置详解
- 时间:2026-05-27
精选合集
更多大家都在玩

大家都在看
更多-

- 原神妮露角色强度解析与培养攻略
- 时间:2026-05-26
-

- 王者荣耀世界游戏设置优化指南
- 时间:2026-05-26
-

- 三角洲行动M7战斗步枪最佳改装方案推荐
- 时间:2026-05-26
-

- 卡厄思梦境卢克卡牌技能效果详解
- 时间:2026-05-26
-
- 异环无名医院快速通关攻略与实用技巧
- 时间:2026-05-26
-

- 王者荣耀世界体力高效规划指南与技巧
- 时间:2026-05-26
-

- 烹饪青菜时,以下哪种做法更能保持营养和口感 蚂蚁庄园今日答案5.25
- 时间:2026-05-26
-

- 光遇5月26日每日任务怎么做 图文攻略详解
- 时间:2026-05-26